FY Zhu, Wangshu Sun
Designed an open-source robotic hand for the disables and also for fun, currently we use the MYO as the input control for gesture control, and will use LeapMotion for interaction usage
http://itpzhufy.com/2015/10/21/hands/

Description
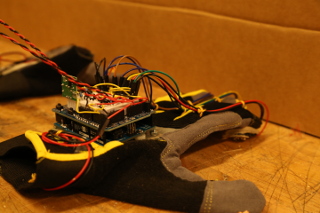
One of the biggest distinction between human-beings to other creatures is that human have hands. Unfortunately, not everyone have two hands. Though 3-D printing is very popular in the current age, it is still not available for everyone to take usage of it. We designed a Low-cost Robotic Hand, with only piece-by-piece materials and standard parts, make it available for everyone to duplicate it only with cardboard, scissor and parts bought in Amazon. We also make a linkage between Myo and our Hands, in order to make the hand controllable by the residue muscles that the most disables have.
The hand works well currently, made with acrylic and a transmission between the computer and the Myo. The whole system has suffered a presentation time for the NYU prototype fund show on Dec 4th, and attracted lots of the attentions and good feedbacks.
The interaction-part currently is a half-slave logic, that is to say, the hand will do some gestures as the user do, but also, some unusual gesture will be another trigger for some pre-determined gesture, like the video shows, turn the palm out will trigger the victory-gesture and turn the palm in will trigger the rock&roll-gesture, that’s only designed for the disables since those unusual gestures actually have the most powerful muscle electricity signal.
For the winter show, I will duplicate another hand made actually with the materials like cardboard and foam, in order to show it’s potential of the duplicatable for everyone, and will make the current hand with another two freedoms of wrist and use the LeapMotion as the input part, in order to finish some simple interactions like Paper-Scissor-Stone and Give-Me-Five.
Classes
Designing for Digital Fabrication, Introduction to Physical Computing