
A virtual arm controlled by the physical arm, could be applied to complete certain task in difficult geography areas.
Ziqi Yan
Description
This is a robot hand which can go through extreme geographical situations and rescue people or does other tough tasks which human are not able to get access in person.
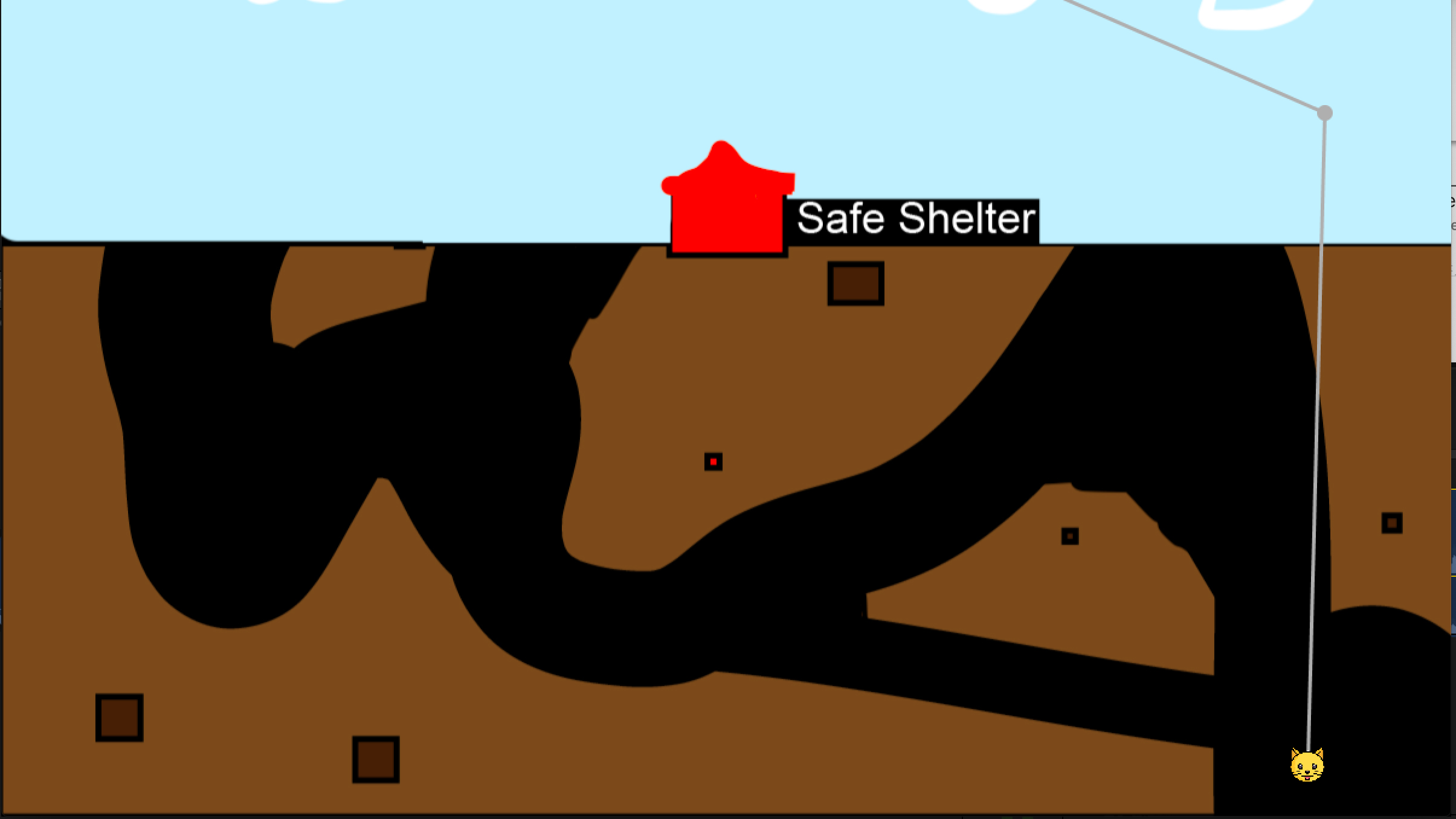
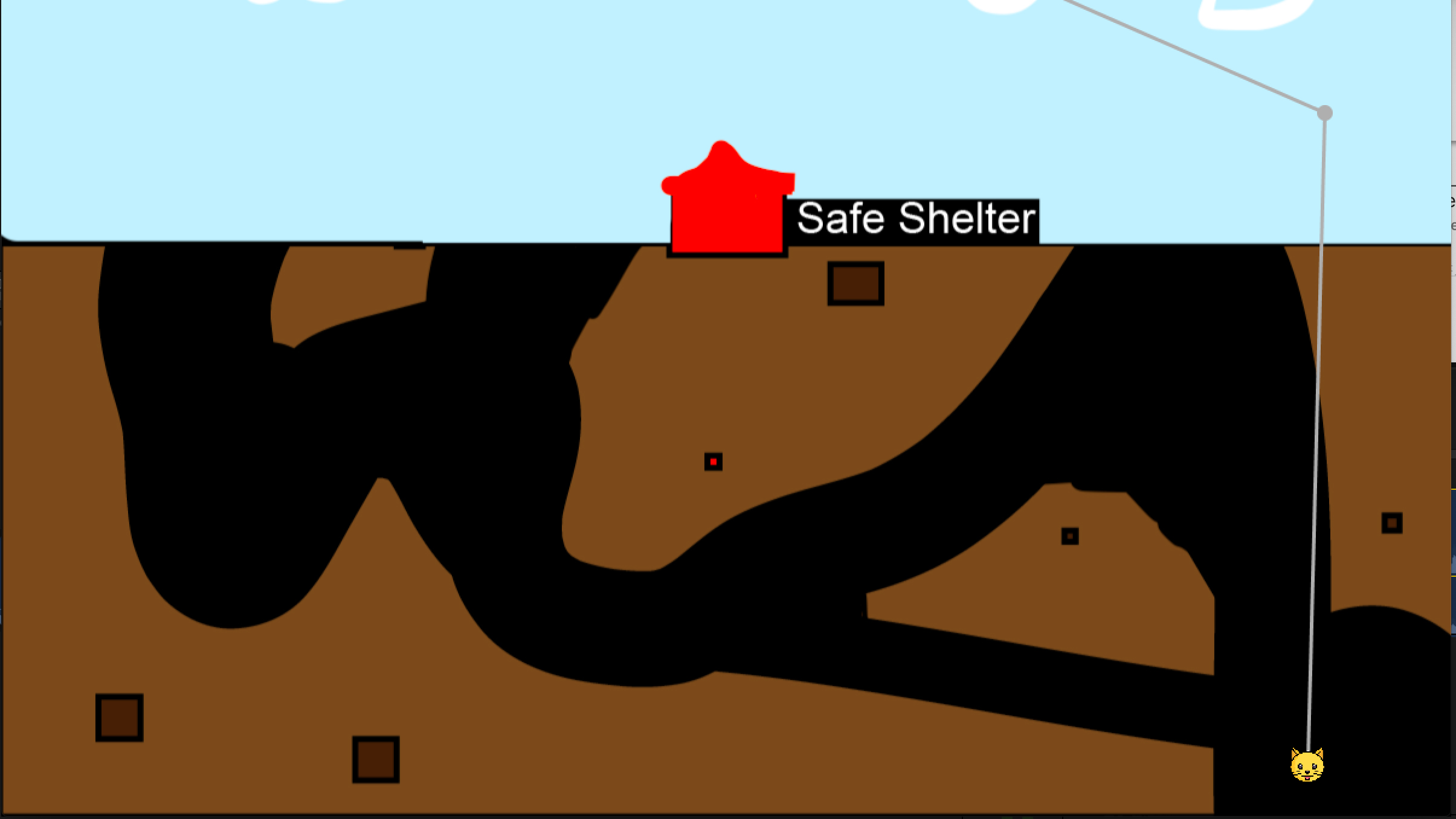
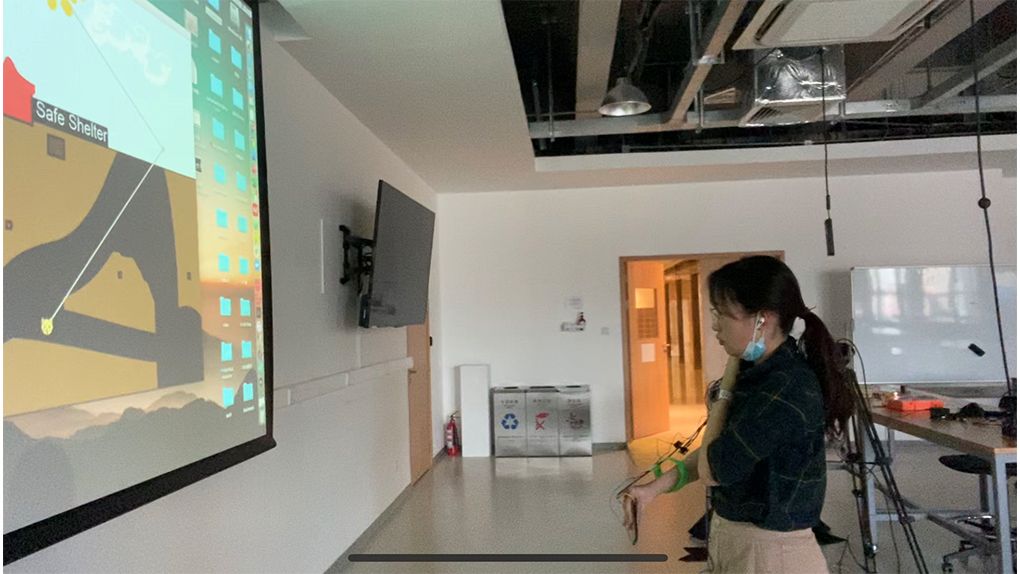
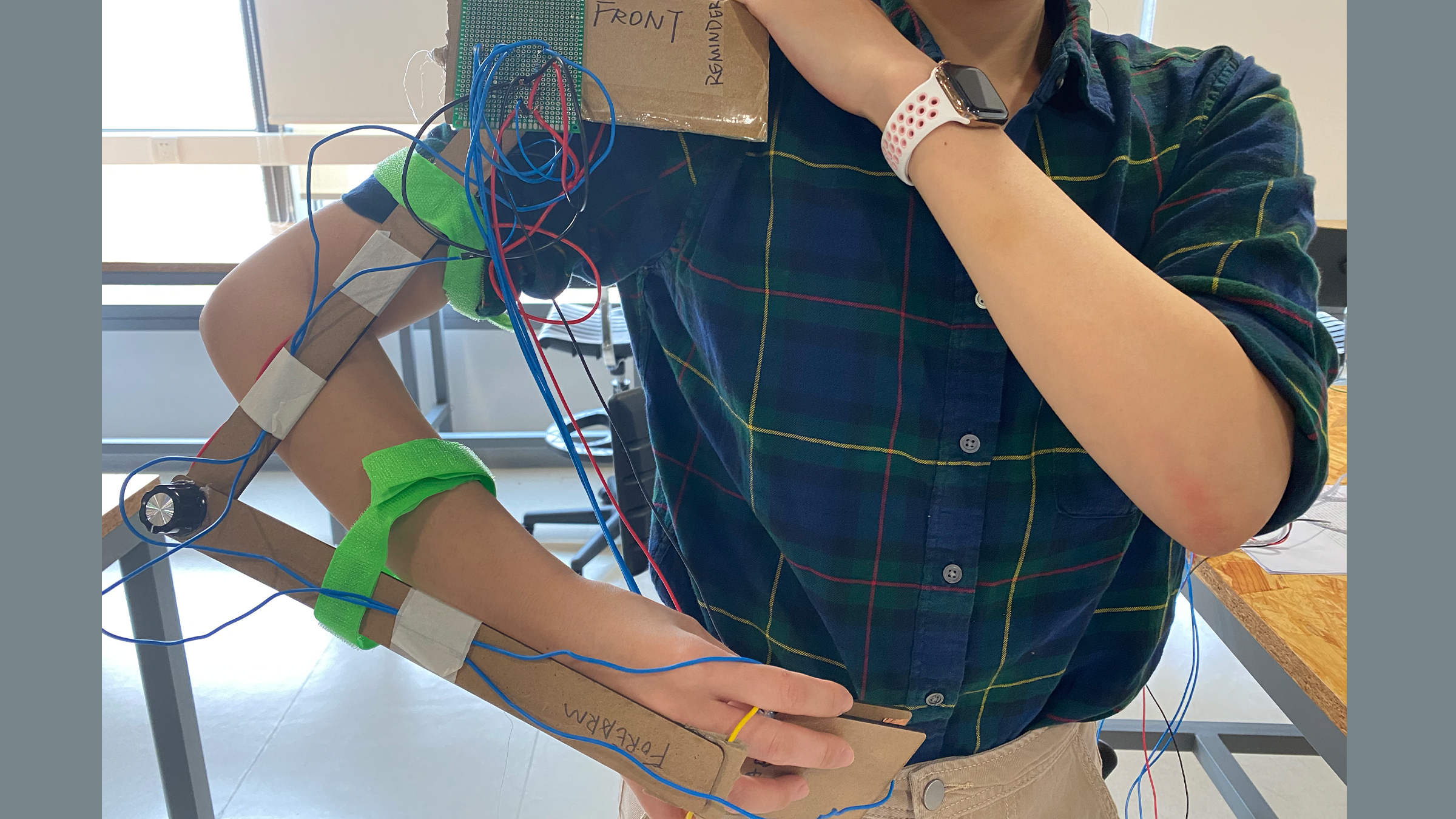
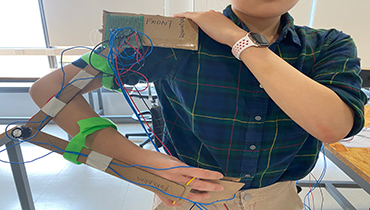
To make the hand mimic the human biological movement, there will be a receiving arm ties to the user’s arm and send the joint move and the grip pressure to the computer. There will also be an acting arm made of special materials that can get through all kinds of tough situations and do the task on the scene. The acting arm will also and has a camera attached sending the real-time video to the computer. The computer will show the current scene of the acting arm to the user, the user can adjust their following movement according to the real-time reflection.
However, in this project, I am not going to build an acting arm, but I will show the corresponding scene by sketching it out by Processing.