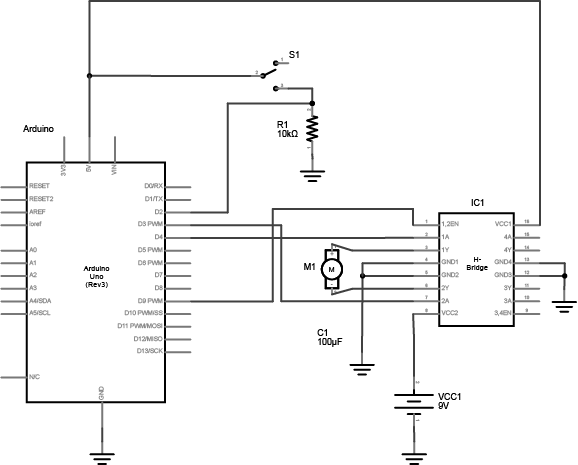
Previous Image Next Image LabDCMotorH-Bridge9V_schem Schematic diagram of an Arduino connected to an H-bridge to control a DC motor.