Fall 2025
Class Times
| Section 6: Tues 09:30am to 12:00pm in 370 Jay St, Room 413 Section 7: Tues 3:20pm to 5:50pm in 370 Jay St, Room 413 |
ITP Physcomp weekly syllabus
ITP Physcomp syllabus with all weeks chart summary
Contact
Book office hours with me on my calendar. I will schedule regular office hour appointment slots which you can book automatically once the semester starts. You’ll need to sign in with your NYU login to see it.
Feel free to email me at danny.rozin@nyu.edu if you have any questions or things you want to talk about.
Class Blogs
Morning class- add your blog URL here
Afternoon class – add your blog URL here
(Sign-in with NYU account)
Week 11 – more communications
Some more Asynchronous serial
{kind=link}
Adding Software Serial to Arduino
To connect to printers and appliances that use RS232, many more
For long distance or many nodes – RS485, many more, explain
MIDI, Control sound and synthesizers from Arduino:
DMX, Control lighting and other theatrical and home automation:
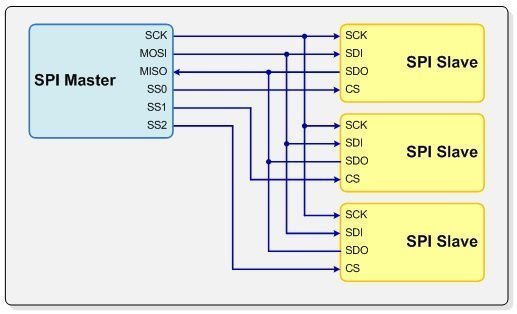
Synchronous serial:
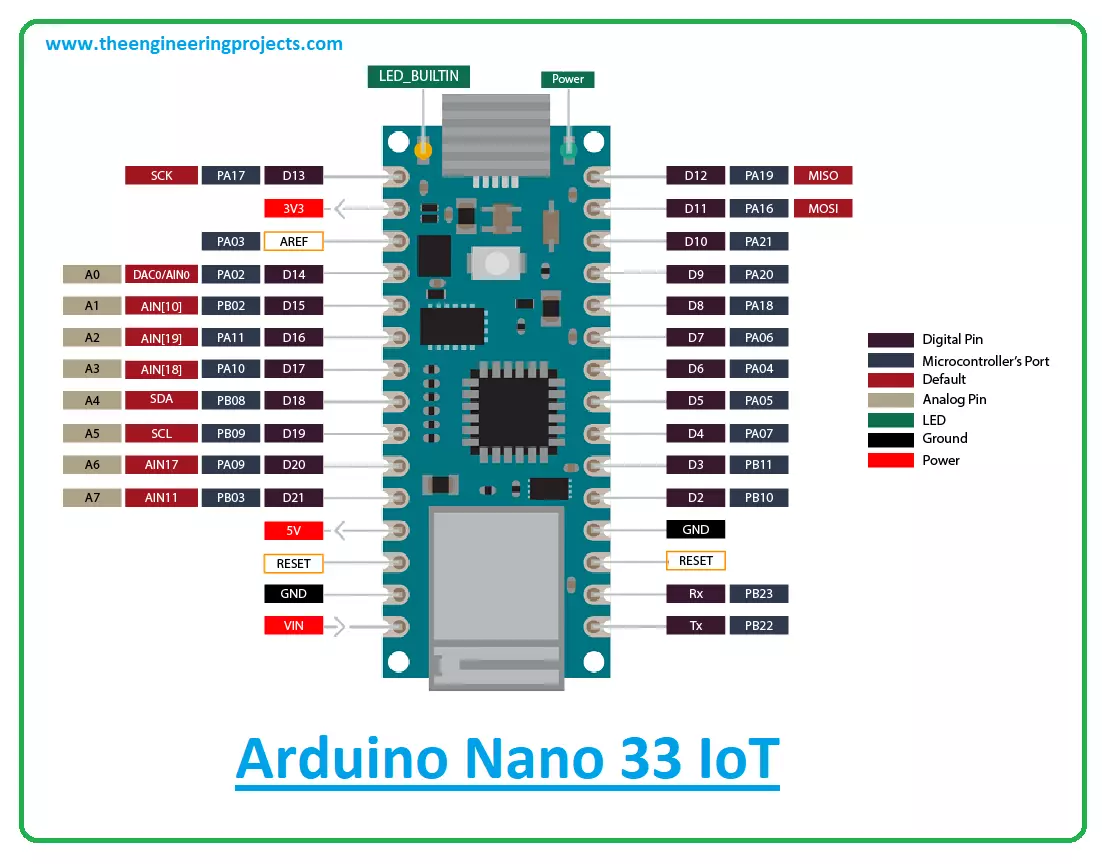
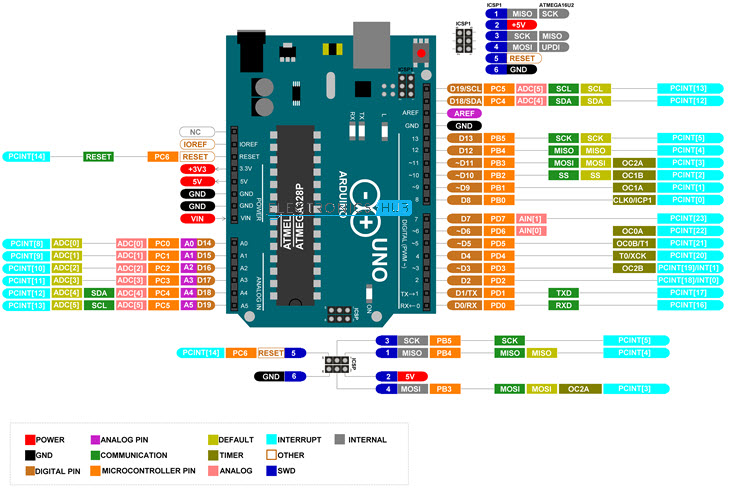
Arduino pins used for synchronous Nano 33IOT, Uno
{kind=link}
{kind=link}
{kind=link}
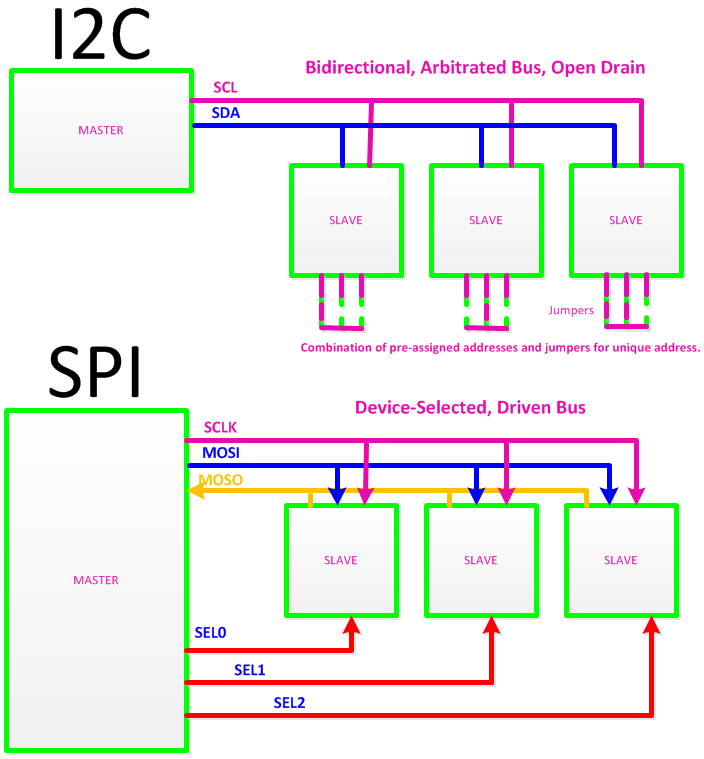
SPI
{kind=link}
I2C
https://www.arduino.cc/en/Reference/Wire
I2C Time of Flight distance sensor lab
I2C infrared temperature sensor lab
Using Arduino Nano 33 IOT accelerometer
Stemma connectors, JST I2C connectors and wires
I2C address translator, and multiplexer
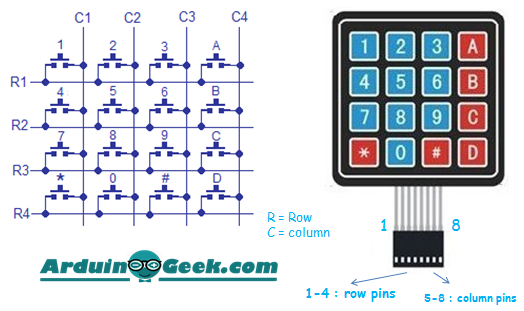
Multiplexing/Shifting :
Arduino ShiftOut reference circuit
https://www.arduino.cc/en/Reference/ShiftIn
http://www.instructables.com/id/Multiplexing-with-Arduino-and-the-74HC595/?ALLSTEPS
Row – Column schematic 3D LED cube diagram
{kind=link}
Another Multiplexer (not serial, analog)
video explaining analog multiplexing
Week 11 – Bills of Materials – BOMs
BOMs, system diagrams and time tables
CONTROLLING YOUR RESOURCES:
- Time
- Money
- Space
PLANNING YOUR PROJECT:
- interaction
- electronics
- space/ enclosure
Sam Levigne RoboCop
Anh Nguyen Happy Feedback Machine
Some BOMS and diagrams of my (Danny) work
Make breadboard schematics – Fritzing
Class 8 – Serial:
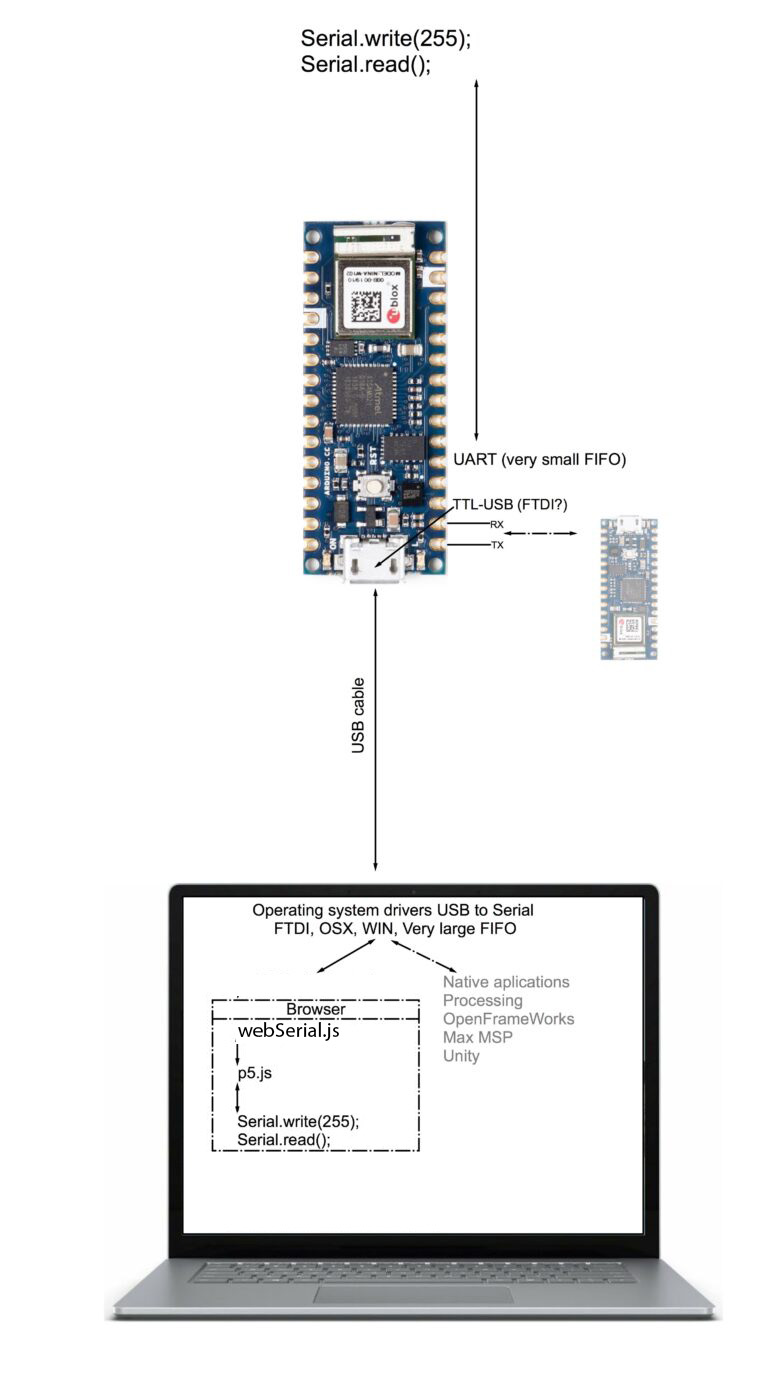
ARDUINO -> P5
P5 and Arduino sketches for sending 1 byte binary from Arduino to P5
P5 and Arduino sketches for sending 1 value in ascii from Arduino to P5
P5 -> ARDUINO
P5 and Arduino sketches for sending 1 byte binary from P5 to Arduino
P5 and Arduino sketches for sending 1 value in ascii from P5 to Arduino
P5 and Arduino sketches for sending 1 byte binary P5 to Arduino with capture
MULTIPLE VALUES
P5 and Arduino sketches for sending multiple values in ascii from Arduino to P5
P5 and Arduino sketches for sending multiple values in ascii from P5 to Arduino with parseInt()
Class 6 – Loads:
AC Loads:
Any AC load can be controlled with Arduino using a relay, including motors, fans, lights, computers,
power switch tail https://www.adafruit.com/products/268 safest and most convenient
Relay https://www.sparkfun.com/products/10924 you need to wire your high voltage through it so be super careful
AC motors
Attributes: Cheap, strong, medium speed, hard to control speed, hard to reverse.
https://www.mcmaster.com/products/motors/electric-motors-1~/voltage~115v-ac?s=ac motors
Geared AC motors
Attributes: cheap, slow, very strong, hard to control speed, hard to reverse.
https://www.mcmaster.com/ac-motors/electric-gearmotors-1~?s=ac-motors
DC Motors
Attributes: Cheap , strong, very fast , you can control speed but not angle, reversible
https://www.adafruit.com/products/711
Geared DC motors
Attributes: Very strong, slow , you can control speed but not angle, reversible https://www.servocity.com/html/micro_gearmotorblocks.html
DC motors with encoder
Attributes: Like DC motors but give you to feedback via optical encoder
https://www.servocity.com/html/3-12v_planetary_gear_motors_wi.html
DC motors from Cars
Stepper motor
Attributes: medium speed, control speed, position, reversible
Video explaining stepper motors and how to drive them
https://www.adafruit.com/products/324
Geared stepper motor
Attributes: slow, strong, control speed, position, reversible
https://www.adafruit.com/products/918
Automotive gauge stepper motor (cluster)
Attributes: very light, weak, cheap , Can work directly from Arduino with no transistors or anything.
Servo
Attributes: slow, strong, control speed, position, reversible, 180 degrees , super easy to control
https://www.adafruit.com/products/155
More servos – https://www.servocity.com/html/servos___accessories.html
Continuous rotation 360 degree servo
Attributes: slow, strong, control speed, reversible, super easy to control
https://www.adafruit.com/products/154
Converting servo to continuous motion
Linear actuators
Attributes: Linear, limited stroke, expensive, control like DC motor, some have potentiometer feedback
https://www.servocity.com/html/12v_linear_actuators.html
Stepper motor linear actuator , more stepper linear actuators
Solenoids
Attributes: Super fast, super short stroke, momentary
https://www.sparkfun.com/products/11015
Mechanical linkages:
Hubs –
https://www.servocity.com/html/hubs__couplers___adaptors.html
https://www.robotshop.com/en/hubs-couplers.html
Couplers –
https://www.servocity.com/couplers/
https://www.mcmaster.com/standard-shaft-couplings
Bearings –
https://www.mcmaster.com/standard-mounted-bearings
Gears –
https://www.servocity.com/html/pinion_gears.html
https://www.mcmaster.com/gears
Chains / sprockets –
https://www.servocity.com/html/sprockets___chain.html
https://www.mcmaster.com/roller-chain-sprockets
Belts / pulleys –
timing belts, O Ring pulleys, cable pulleys
https://www.mcmaster.com/timing-belt-pulleys
Power supplies:
Power supplies on Adafruit – search 12v power supply, search multiple output
computer power supplies, how to use computer power supplies
How to tell the capabilities of computer power supply
Wires
{kind=link}
{kind=link}
More from my Designing for Digital Fabrication class
Second class:

Hight of water reservoir = Potential = volts = v
Narrowness of pipe = Resistance = ohms = R
The resulting flow of water= Current = Amps = I
Fritzing github (free?), or buy, github mac, github Windows
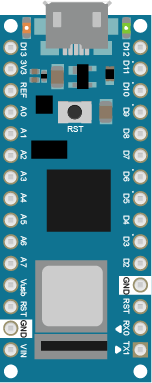
Arduino Nano 33 IOT page and download Fritzing part

Breadboard connections
First class
Fantasy Device – As a class, we’ll make a list of fantasy devices; things that don’t exist, but that we wish did. For today, we’ll ignore technical feasibility and concentrate on how you’d operate these devices if they did exist. We’ll divide into groups of 3. Pick a fantasy device from the list. Design/mockup a control interface for this device and demonstrate it in class. Try to think physically and avoid too much screen controls, speech and direct mind control…
It is sometimes useful to think in terms of WH questions and try to answer them in your design:
WHO? WHEN? WHERE? WHAT?
Lets take an example, A popular fantasy device in movies and books is a time machine. In movies and TV, the production has to imagine what these devices look like and how they are controlled:
“Back to the future” movie:


So thinking about the WH questions:
WHAT is it ? – A car.
WHO gets to go ? – anyone in the car.
WHERE does it take you ? Set in the control panel.
WHEN does it activate ? When the car reaches 80 MPS.
Stewie from “Family Guy” time machine:


Here the designers decided the machine is a cabinet, but they also added a disc that goes with Stewie and is used to get back:
WHAT? – A cabinet and a disc
WHO gets to go? Anyone in the cabinet or on the disc.
WHEN does it activate ? Not sure, but there is a big red button…
WHERE does it take you? There is a control panel, note that the control seems to be relative, so you can go forwards and backwards, not absolute like in “Back to the future”
“Spongebob Squarepants” time machine:
Here the machine is the freezer from the Crusty Crab, note that the whole freezer travels through time and it is ripped from it’s surroundings
WHAT is it ? A freezer.
WHO gets to go ? Whoever is in the freezer.
WHERE does it go? Hard to say, looks like two levers and no display.
WHEN does it activate? Hard to say, but it has some buttons.